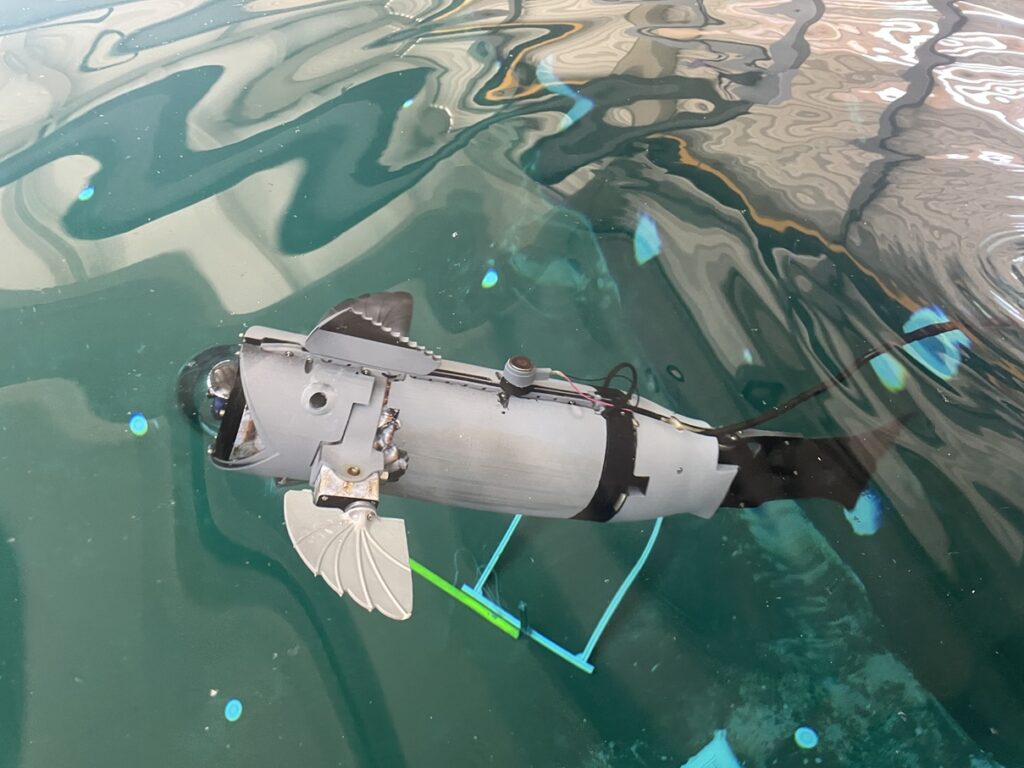
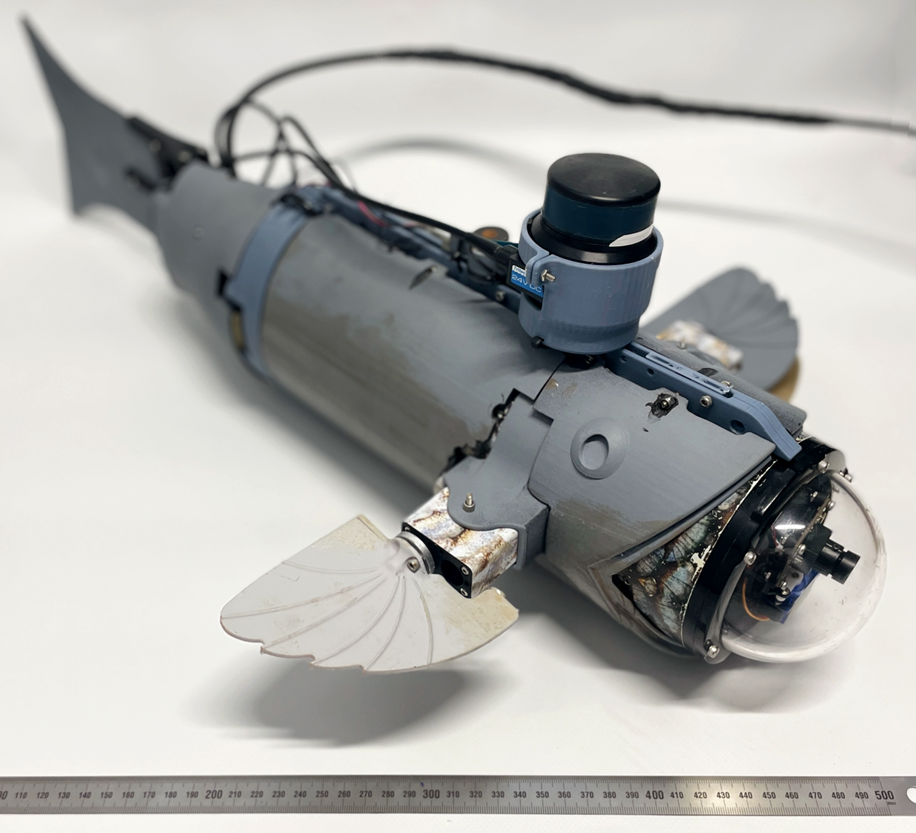
El Centro de Investigación en Robótica y Tecnologías Subacuáticas (CIRTESU) de la Universitat Jaume I de Castelló ha desarrollado un prototipo experimental de pez robótico modular y bioinspirado, denominado UJIFISH-I, orientado a la inspección, la teleoperación híbrida y el despliegue de sensores en entornos de acuicultura.
La principal novedad de esta plataforma reside en su diseño funcional, concebido para minimizar la alteración del entorno y reducir el estrés de los peces frente a otros sistemas robóticos subacuáticos. Para ello, prescinde de elementos como las hélices o la iluminación de alta intensidad y apuesta por una arquitectura con propulsión ondulatoria bioinspirada, que disminuye el ruido mecánico, la turbulencia hidráulica y las perturbaciones físicas que pueden modificar el comportamiento natural de los animales.

El equipo investigador explica que esta plataforma robótica biomimética con forma de pez ha sido diseñada, desarrollada y validada técnicamente para ofrecer una intervención más respetuosa con el ecosistema acuático y con el bienestar animal.
Inspección, sensores y transmisión de datos en tiempo real
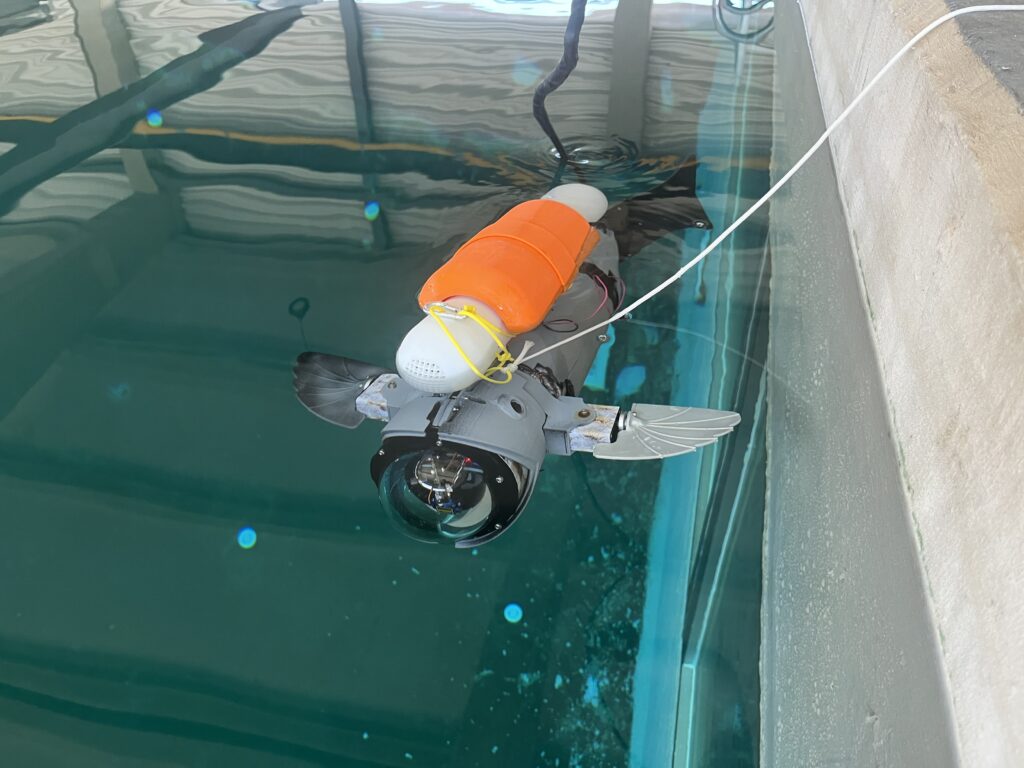
UJIFISH-I está equipado con un sistema de detección modular que permite adquirir datos en tiempo real y transmitir imágenes de forma simultánea cuando opera por cable. Además, dispone de capacidad híbrida de comunicación, ya que también puede conectarse mediante módem acústico.


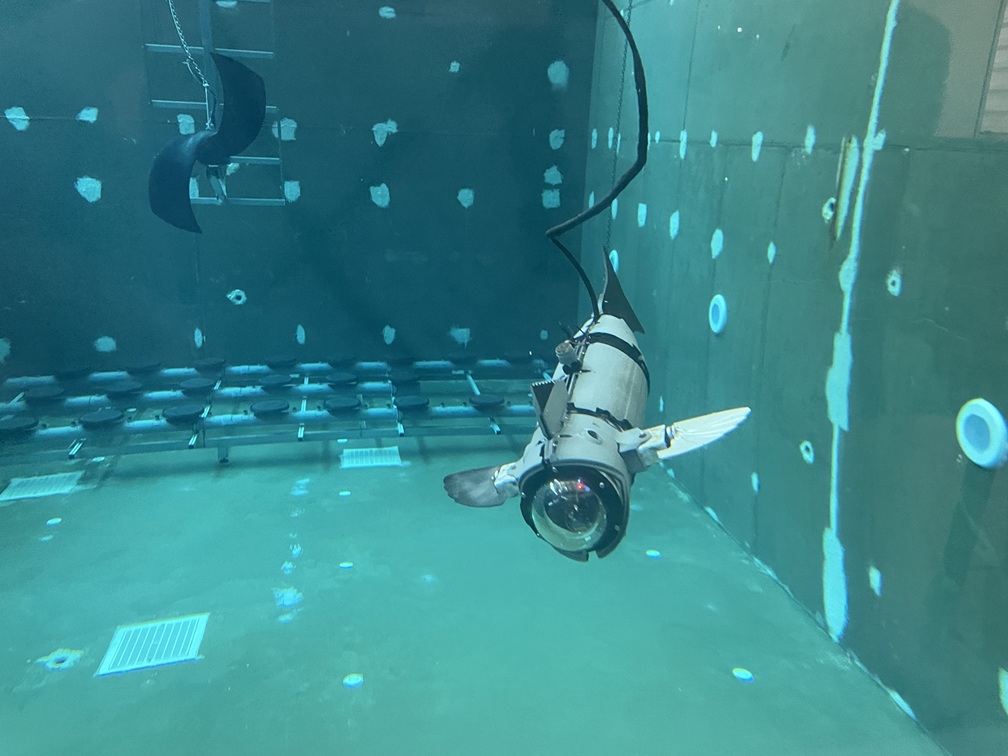
Para la visión incorpora un sistema panorámico con giro de 180 grados, que facilita una perspectiva frontal y lateral. El prototipo puede descender hasta 20 metros de profundidad y permite el control remoto, mediante módem, a una distancia de entre 150 metros en vertical y 500 metros en horizontal.

Su diseño integra sensores para mediciones continuas de temperatura del agua y profundidad, aunque también admite la incorporación de otros dispositivos para obtener datos sobre salinidad, conductividad, pH, oxígeno disuelto o gases. Además, facilita la inspección directa de redes y el seguimiento de las condiciones del agua y del entorno inmediato de los peces.

Otra de sus prestaciones destacadas es un sistema de despliegue que le permite transportar y liberar componentes auxiliares en ubicaciones concretas dentro de la instalación.
Un diseño adaptado al entorno marino
La geometría y las dimensiones del robot se han escalado para asemejarse a especímenes adultos, al igual que su frecuencia de aleteo. El mecanismo de cola oscilante funciona con servomotores impermeables, se han eliminado los actuadores de alta frecuencia y se ha priorizado la integración de sensores internos para evitar señales intermitentes.
Gracias a ello, la natación del dispositivo genera perfiles hidrodinámicos más suaves y una menor perturbación acústica, dos factores clave para operar en instalaciones acuícolas sin interferir de forma agresiva en el entorno.
Pruebas superadas y próximos avances
Los resultados experimentales han confirmado la viabilidad funcional del prototipo, con una alta maniobrabilidad y una precisión fiable en la detección de objetivos. En las pruebas realizadas se han abordado tareas de inspección de redes, teleoperación, recopilación de datos y despliegue de sensores en condiciones controladas.
A juicio del equipo, la flexibilidad demostrada por UJIFISH-I resulta esencial en este tipo de escenarios, en los que las necesidades de monitorización y las limitaciones tecnológicas cambian según la especie, la infraestructura o las condiciones ambientales.
El desarrollo representa un avance relevante en la acuicultura de precisión y en la robótica subacuática, al ofrecer una herramienta que favorece operaciones más sostenibles y reduce la necesidad de intervención humana en entornos subacuáticos de riesgo. También sienta una base técnica para futuras investigaciones biológicas sobre el impacto a largo plazo de la robótica biomimética en el bienestar animal.
Las próximas líneas de trabajo se centrarán en mejorar la autonomía, la resistencia y las capacidades perceptivas del robot. Entre los futuros desarrollos figura la incorporación de hidrófonos, sensores avanzados para medir actividad acústica y parámetros ambientales esenciales, así como el diseño de un sistema de vejiga natatoria artificial que permita controlar activamente la flotabilidad, ampliar el rango de profundidad operativa y mejorar la eficiencia energética.